 Популярные статьи Популярные статьи | |
| Сейчас на сайте |  Гостей: 1 Гостей: 1
На сайте нет зарегистрированных пользователей
Пользователей: 9,955
новичок: Logyattella
|
|
| Декартовы координаты на плоскости. Основные понятия [КОМПАС-3D LT] |
Простейшей системой координат на плоскости является система декартовых
координат - рис. 3.3.
Откройте файл фрагмента с именем Работа 3 СК оси масштабы.frw, в котором
изображена эта декартова система координат.
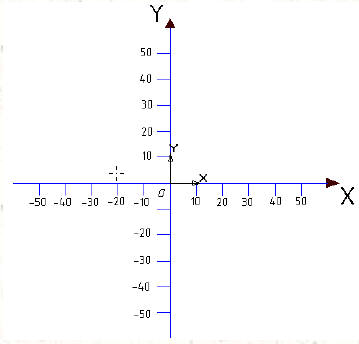
Рис. 3.3
Две перпендикулярные прямые, проведенные на плоскости, образуют оси
координат. Точка пересечения этих прямых является началом координат О. Начало
координат делит каждую ось на положительную и отрицательную полуоси.
Положительными x- и y- полуосями на рис. 3. являются прямые OX и OY,
соответственно.
Теперь каждую точку плоскости можно описать двумя числами - координатами
точки.
Вспомним, как это можно сделать.
Пусть на плоскости задана точка Р.
Требуется найти координаты этой точки в декартовой системе координат - рис3.4.
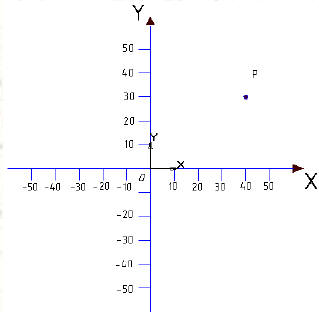
Рис. 3.4
Проведем через точку Р прямые линии, параллельные осям OX и OY - рис.3.5.
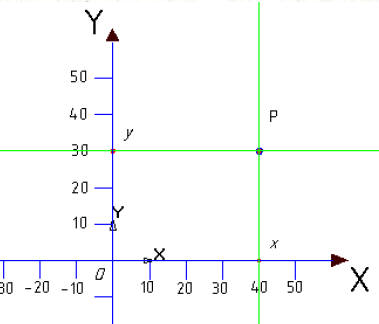
Рис. 3.5
Обозначим точки пересечения этих прямых с полуосями через x и y,
соответственно.
Координатами x и y точки Р являются длины отрезков Ox и Oy, как показано на
рис. 3.6
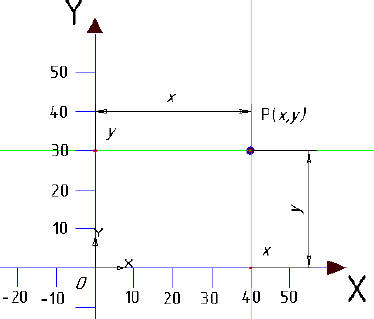
Рис. 3.6
Координаты точки обычно записываются в скобках, например P(x, y).
Легко увидеть, что для точки Р координата x=40 мм, а координата y=30 мм. Итак, на
плоскости в данной декартовой системе координата задана точка Р(40,30).
Теперь мы готовы к тому, чтобы научиться ставить точки с определенными
значениями координат.
Задание 1.
Научиться создавать точки с определенными значениями координат. Изучить
режим редактирования свойств объекта.
1. Создайте лист фрагмента.
Посмотрите на лист фрагмента. В центре окна графического документа вы видите
две оси координат - OX и OY.
Примечание.
При работе с листом чертежа начало координат, т.е. точка с координатами X=0 и
Y=0 в слое с номером 0 совпадает с левым нижним углом чертежа. Ось 0X направлена по
горизонтали вправо, ось 0Y - вертикально вверх.
2. Выберите команду Точка.
Под панелью управления появилась знакомая вам строка параметров объекта -
точки 
Это очень важная строка. Ее можно назвать паспортом объекта.
При создании объекта - вы можете задать параметры точки: координаты x и y,
стиль (форму) точки. Система запоминает заданные вами параметры и при
редактировании объекта снова выводит строку параметров объекта.
3. Знакомимся с клавиатурной привязкой: Ctrl - <0> (цифра 0 нажимается на
цифровой клавиатуре.
Нажмите комбинацию клавиш Ctrl - <0>.
|
|
| Комментарии |
| Добавить комментарий |
|
Пожалуйста залогиньтесь для добавления комментария.
|
| Рейтинги |
|
Рейтинг доступен только для пользователей.
Пожалуйста, залогиньтесь или зарегистрируйтесь для голосования.
Нет данных для оценки.
|
|
| Гость |
Вы не зарегистрированны? Нажмите здесь для регистрации.
Забыли пароль? Запросите новый здесь.
|
| Мини-чат | Вам необходимо залогиниться.
Нет присланных сообщений.
|
|


